-
Par g6sumo31 le 28 Mai 2019 à 17:12
Il existe 4 types de mobilité pour les robots :
-les roues
-les chenilles
-les pattes
-les jambes
Pour représenter les coûts de chacune de ces solutions voici un schéma :

Pour garantir sa stabilité il faut que le poid soit également réparti sur l'ensemble du robot. Les composants les plus lourds doivent être placé le plus bas possible.
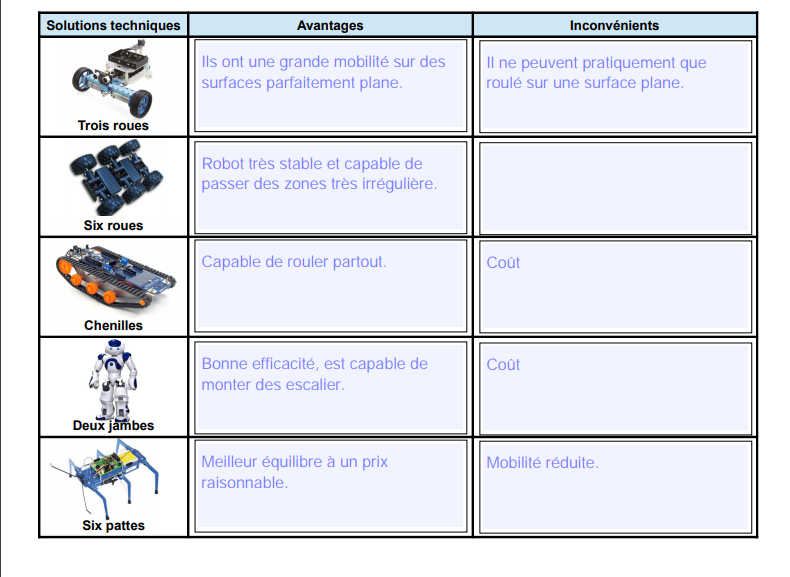
Pour résumé Les solutions possibles pour la mobilité voici un tableau avec différents types de mobilités:

Rémi,Nathéo,Leila,Shanna
 Suivre le flux RSS des articles de cette rubrique
Suivre le flux RSS des articles de cette rubrique


|
|
|
|